快捷功能
快捷功能分为以下几部分:
文件
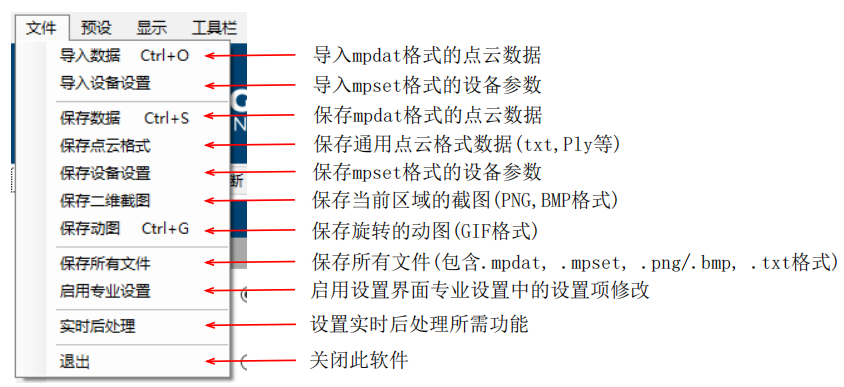
"文件"可进行"导入数据(Ctrl+O) "、"导入设备设置"、"保存数据(Ctrl+S) "、"保存点云 格式"、"保存设备设置"、"保存二维截图"、"保存动图(Ctrl+G) "、"保存所有文件"、"实时后处理"、"实验功能"和"退出"等操作,如图3.38所示。
保存通用点云格式
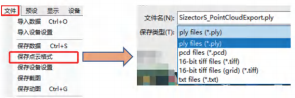
可以根据需要选择点云格式,如图3.39。
保存所有点云格式
可选择要保存的文件,一键保存,如图3.40。

实时后处理
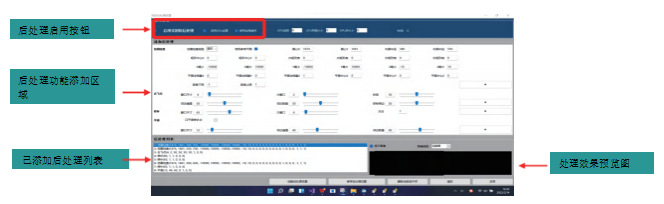
1) 范围检查
检查范围类型可以选择"矩形"和"圆环",同时根据选择的不同,矩形需要设置:矩形中心X、 矩形中心Y、内矩形宽、内矩形高、外矩形宽和外矩形高。圆环需要设置:圆心X、圆心Y、内圆半径 和外圆半径。通过设置Z最小,Z最大(单位mm) 可以将小于最小的值和大于最大的点云去除掉。

更多内容可参考相关文档:后处理范围检查使用说明
2)去飞点
窗口尺寸:相邻点的范围,取值范围[0, 100],值越大则去飞点越多;
次窗口:在相邻点基础上找相关点的范围,取值范围[0, 100],值越大则去飞点越多; 斜率:相邻点倾斜参数,范围[0, 100],值越大则将去除越多非飞点;
临近阈值:相邻点相近判断参数,[0, 100],值越大则将去除越多飞点;
临近数量:相近相邻点数目参数,[0, 100],值越大则将去除越多飞点;
抑制窄边:窄边抑制参数,[0, 100],值越大则将去除越多飞点;
![]()
3)修补
窗口尺寸:相邻点的范围,取值范围[0, 100],值越大则修补越多;
次窗口:膨胀法额外的相邻点的范围,取值范围[0, 100],值越大则修补越多; 方法:只能设置为0或者1,0:膨胀法;1:插值法;
![]()
4)平滑
邻近点数据的平均
窗口尺寸:相邻点的范围,取值范围[0, 100],值越大则平滑越多;
邻近阈值:相邻点相近判断参数,取值范围[0, 100],值越小则越多点参与降噪;
邻近数量:相近相邻点数目参数,范围[0, 100],值越小则越多点参与降噪;

5)SPI3
详细说明参考相关专题文档:后处理SPI3使用说明
6)基准面矫正
详细说明参考相关专题文档:基准面矫正
7)分割中值滤波
详细说明参考相关专题文档:分割中值滤波
8)修补(基于区域)
详细说明参考相关专题文档:修补(基于区域)
预设
点击软件左上角菜单栏中的"预设"选项,如图3.49所示。
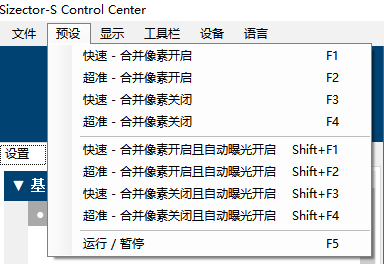
a) 单击"快速-合并像素开启F1"(快捷键F1),软件会以预设好的参数(工作模式为快速,开启 合并像素功能、曝光模式为手动模式,获得较高的帧数、较低的分辨率) 开始自动连续采集拍摄、 更新3D图像。
b) 单击"超准-合并像素开启F2"(快捷键F2),软件会以预设好的参数(工作模式为超准,开启 合并像素功能、曝光模式为手动模式,获得较低的帧数、较低的分辨率) 开始自动连续采集拍摄、 更新3D图像。
c) 单击"快速-合并像素关闭F3"(快捷键F3),软件会以预设好的参数(工作模式为快速,关闭 合并像素功能、曝光模式为手动模式,获得较高的帧数、较高的分辨率) 开始自动连续采集拍摄、 更新3D图像。
d) 单击"超准-合并像素关闭F4"(快捷键F4),软件会以预设好的参数(工作模式为超准,关闭 合并像素功能、曝光模式为手动模式,获得较低的帧数、较高的分辨率) 开始自动连续采集拍摄、 更新3D图像。
e) 单击"快速-合并像素开启且自动曝光开启Shift+F1"(快捷键Shift+F1),软件会以预设好 的参数(工作模式为快速,开启合并像素功能、曝光模式为指定质量自动曝光,获得较高的帧数、 较低的分辨率) 开始自动连续采集拍摄、更新3D图像。
f) 单击"超准-合并像素开启且自动曝光开启Shift+F2"(快捷键Shift+F2),软件会以预设好 的参数(工作模式为超准,开启合并像素功能、曝光模式为指定质量自动曝光,获得较低的帧数、 较低的分辨率) 开始自动连续采集拍摄、更新3D图像。
g) 单击"快速-合并像素关闭且自动曝光开启Shift+F3"(快捷Shift+F3),软件会以预设好的 参数(工作模式为快速,关闭合并像素功能、曝光模式为指定质量自动曝光,获得较高的帧数、较高的分辨率) 开始自动连续采集拍摄、更新3D图像。
h) 单击"超准-合并像素关闭且自动曝光开启Shift+F4"(快捷键Shift+F4),软件会以预设好 的参数(工作模式为超准,关闭合并像素功能、曝光模式为指定质量自动曝光,获得较低的帧数、 较高的分辨率) 开始自动连续采集拍摄、更新3D图像。
i) 点击"运行/暂停 F5"(快捷键F5) ,软件开始或者暂停拍摄、更新图像。
显示
"显示"菜单中包含"进入全屏/退出全屏 F6"、"开启旋转/关闭旋转 F7"、"执行自动色谱范围 F8"、"开启/关闭平铺显示"等四个功能选项,如图所示:

a)首次点击"进入全屏/退出全屏 F6 "(快捷键 F6) ,软件窗口将退出全屏变成最大化,再次点 击"进入全屏/退出全屏 F6 "(快捷键 F6) 图像以全屏显示,再次点击"进入全屏/退出全屏 F6 "( 快捷键 F6) 后退出图像全屏,软件进入全屏状态,以此类推;
b)点击"开启旋转/关闭旋转 F7 "(快捷键 F7) ,图像将在一定的角度内进行旋转;
c)单击"执行自动色谱范围 F8 "(快捷键F8) ,图像将根据当前点云的高度值进行重新色阶;
d)点击"开启/关闭平铺显示",可在显示中设置多窗口平铺显示或设置显示模块的TileDis- playEnable属性。
工具栏
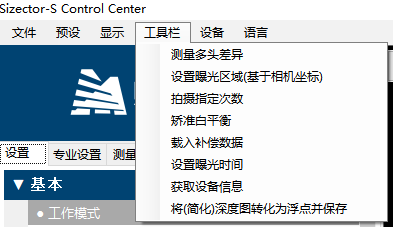
测量多头差异
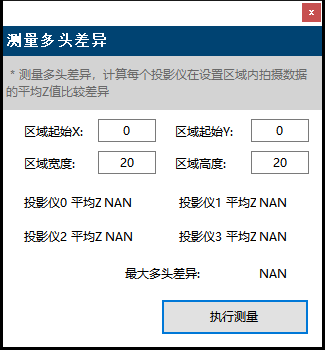
测量多头差异是计算多个投影仪在设置区域内拍摄数据的平均Z值比较差异
操作步骤:
- 设置用于计算平均Z值的区域位置及大小
- 点击执行测量按钮
- 等待测量完成后查看结果
设置曝光区域(基于相机坐标)
设置曝光区域(基于相机坐标)是在相机的坐标系下设置曝光区域的相关参数,如下图3.71所示。
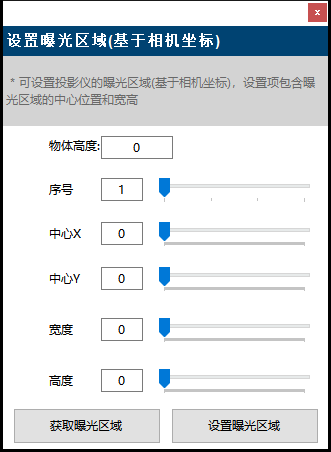
操作步骤:
- 设置曝光区域拍摄物体的高度
- 点击获取曝光区域按钮,可将当前的投影仪坐标下的曝光区域相关信息转换为相机坐标下的信息
- 修改设置参数
- 点击设置曝光区域按钮,可将当前相机坐标下的曝光区域相关信息转换为投影仪坐标下的信息并保存进设备中
拍摄指定次数
根据指定的次数进行拍照,拍摄完成指定次数后会停止拍照。如下图3.72所示。

操作步骤:
- 输入要拍摄的次数
- 点击确定按钮
- 等待拍照完成
矫准白平衡
校准白平衡是针对RGB外部曝光功能开发的工具,其作用是可以自动计 算RGB三个通道的曝光时长,以减少RGB三通道融合之后的颜色误差。如下图3.73所示。
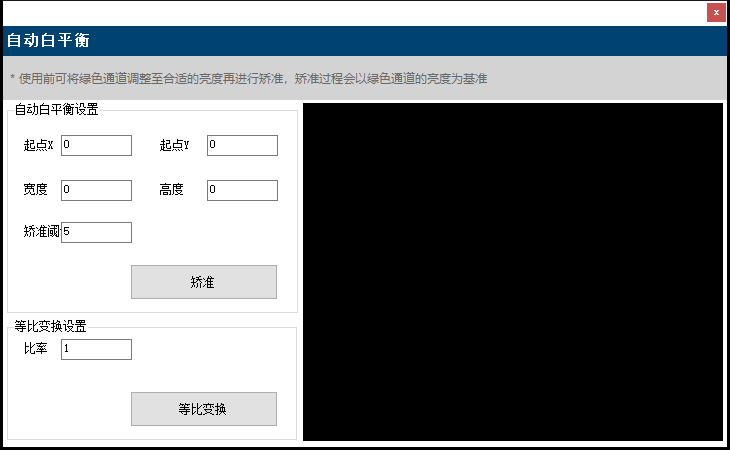
操作步骤:
- 打开白平衡校正窗口
- 在自动白平衡设置中调整用于计算亮度的区域位置和大小,并设置矫准阈值。
- 点击矫准按钮,等待矫准完成。
- (可选)在等比变换中设置比率大小,可等比例调整外部曝光图像整体亮度
- 完成
载入补偿数据
MPSizectorS SDK提供软件层面的数据补偿功能,在拍摄之前可以 先加载一个本地补偿数据,拍摄3D数据时,软件会用拍摄数据减去本地补偿数据,拍摄结果为融合之后的数据。
操作步骤:
- 点击载入补偿数据
- 选择要导入的补偿数据文件
- 完成
设置曝光时间
可设置设备的曝光时间,单位毫秒(ms),如下图3.74所示。
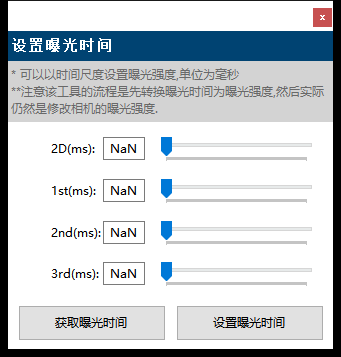
操作步骤:
- 点击获取曝光时间按钮,可将当前设备的曝光强度转换为单位为毫秒的曝光时间
- 修改曝光时间设置
- 点击设置曝光时间按钮,可将当前设置单位为毫秒的曝光时间转换为曝光强度写入设备
- 完成
关于曝光时间更多说明参考相关专题文档:曝光强度和曝光时间
获取设备信息
可获取当前设备超快模式及超动态模式相关只读参数以及最近一次拍照的相关时间信息
操作步骤:
- 点击获取设备信息
- 查看结果
将(简化)深度图转化为浮点并保存
将当前的深度图或简化深度图格式的3D数据,转化为浮点3D并保存为mpdat格式文件。
操作步骤:
- 拍摄或读取(简化)深度图格式3D数据
- 点击将(简化)深度图转化为浮点并保存
- 选择路径和文件名并保存文件
设备
用户点击软件左上角菜单栏中的"设备","设备"包含当前已连接设备的序列号和功能选项,
如图3.57:


点击"关闭",软件将关闭和所有3D相机的连接,在选择相机的序列号后将重新连接对应相机。
语言
可点击"中文"或者"English"选择SDK界面的语言。
