显示
显示模块分为四个部分
- 显示控制
- 像素信息
- 数据帧信息
- 3D模型显示设置

显示控制
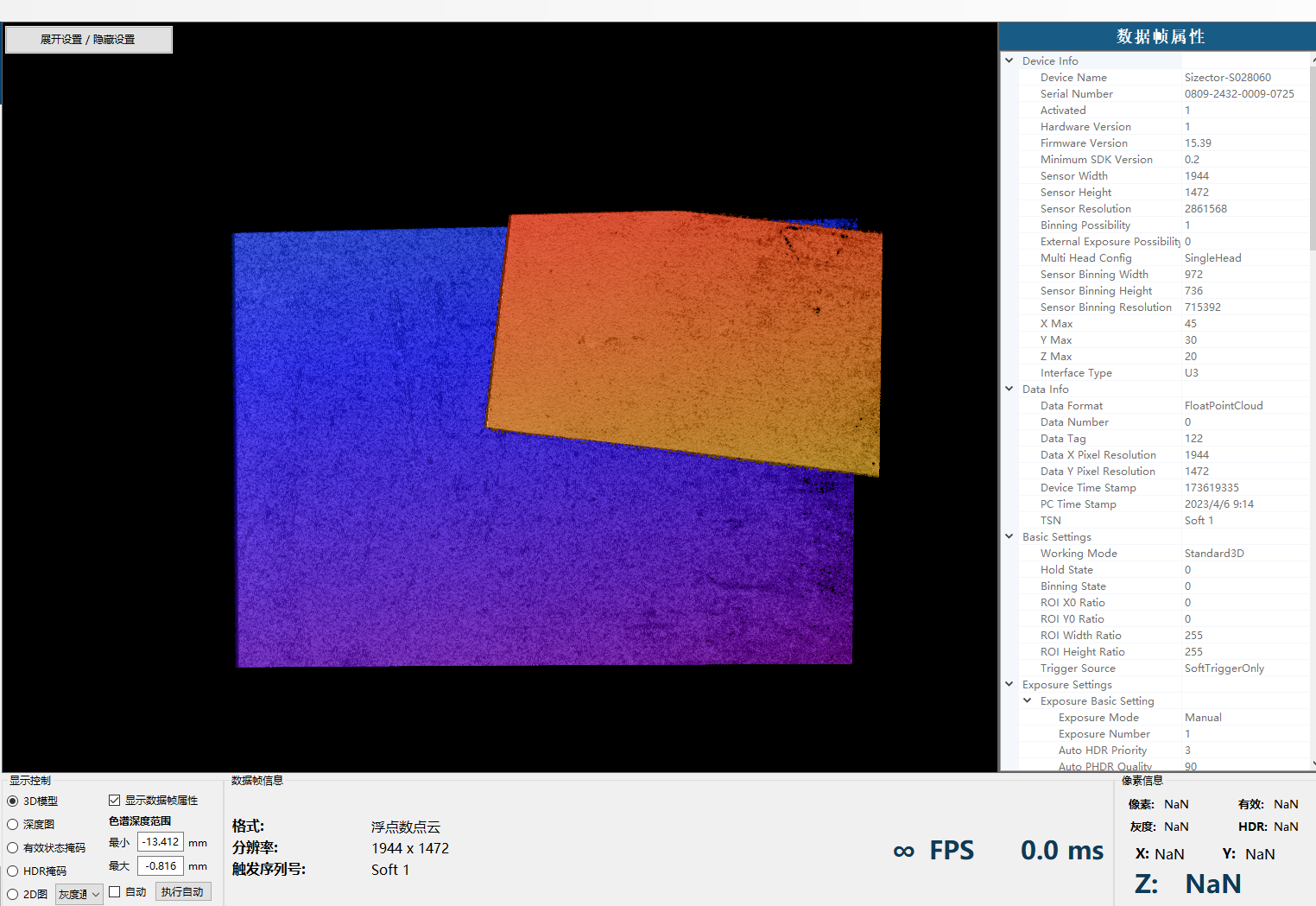
相机拍摄的3D图像有"3D模型"、"深度图"、"有效状态掩码"、"HDR掩码"和"2D图"等五种显 示模式,如图3.30。
拍摄的3D图默认以Z轴色谱的方式显示,即按照Z值和色谱范围,将Z值与颜色对应起来。Z值 越大越趋向红色,Z值越小越趋向蓝色,Z值越接近0则越趋向绿色。此外,图像也可以2D灰度掩码 显示,常见的显示方式见下图:



色谱范围显示有""执行自动"、"自动"和"手动"三种模式。点击"执行自动",3D图像效果则 自动显示出当前图像的最佳色谱颜色。勾选"自动",3D图像效果则实时自动显示出当前图像的 最佳色谱颜色,在检测图像高度发生变化时也将自动根据最新的高度显示最佳色谱颜色。"手动" 模式指的是3D图像效果根据手动设置的色谱深度范围最大最小值显示色谱颜色。

当勾选"显示数据帧属性"时,将在图像显示窗口中弹出"数据帧属性"菜单页,在此处会显示 当前相机的所有设置参数。
像素信息
鼠标在除3D模型外其他显示方式的图像上移动时,对应像素的信息会实时显示在软件右下 方(如图3.34) ,包括对应像素点的像素坐标值、灰度值、有效状态、HDR值、物理坐标值和高度等。
像素值:即鼠标所指该点的像素坐标值。
灰度值:即鼠标所指该点的8位灰度值。
有效:用于对三维重构的数据点进行判断,当掩码值为 \"OK\"时,代表重构的三维点为有效点; 当此掩码值为 \"ReconFail\"时,代表此坐标点未完成三维重构。
HDR:HDR掩码值,可以通过该值判断使用的是第几次的曝光结果。

数据帧信息
数据帧信息显示如下图:

格式表示当前显示的数据帧的数据格式,不同的数据格式如下:
- 2D图像:2D数据模式,包含灰度信息,没有X,Y,Z信息。
- 浮点数点云:浮点数点云3D数据模式。X,Y,Z分别通过32位浮点数表示。
- 定点数点云:定点数点云3D数据模式。X,Y,Z分别通过16位定点数表示。
- 深度图:定点数深度图数据模式。没有X,Y的信息,Z通过16位定点数表示。
- 简化的深度图:简化的定点数深度图数据模式。没有X,Y以及灰度和掩码的信息,Z通过16位定点数表示。
同时会显示当前数据的分辨率,触发序列号,近期拍摄的帧率和每次拍摄的平均时间
3D模型显示设置
3D模型显示设置分为三个部分:
颜色
渲染
视窗
颜色
设置项如下图:

色谱深度范围表示下方谱段颜色的高度范围,根据高度分配对应的颜色,超出最大高度的颜色及低于最小高度的颜色分别对应下方的超高和超低。
渲染
设置项如下图:

- 纹理模式:表示计算颜色所使用的数据基础,其中混合表示高度与灰度混合作为基础,通道表示所使用的灰度数据通道
- 多边形:表示绘制三维模型时的方法,可使用点绘制,线绘制或者填充绘制
- 使用法向量:开启法向量后,可以使图像立体感更强
- 镜面反射:开启后可使图像表面更光滑
- 截图用透明背景:开启后将背景色设为透明
- 使用显示过滤:开启后绘制3D图像时会过滤掉部分飞点
- P/L尺寸:设置点的大小和线的宽度
- 分辨率:显示控件的大小
视窗
设置项如下图:

视角:表示沿Z轴旋转的角度
旋转: 开启后图像自动旋转,Sw表示沿X轴Y轴旋转,Z表示沿Z轴旋转,可设置旋转的速度和幅度
视窗与姿态矩阵:可设置观察视角和物体的旋转姿态,具体参数含义如下:
TZ分别表示图像沿X轴的平移量,沿Y轴的平移量,沿Z轴的平移量
ER分别表示相机视角沿X轴的旋转角度,沿Y轴的旋转角度,沿Z轴的旋转角度
OR分别表示图像沿X轴的旋转角度,沿Y轴的旋转角度,沿Z轴的旋转角度