成像问题排查
1.成像问题粗定位
根据存在成像问题像素的mask提示(具体参考:3D相机-用户手册-软件使用-显示-像素信息)粗定位成像问题:
- 过曝(OverExposure): 对应值为1, 代表此坐标点为过曝点;开启HDR功能时辅助查看HDR掩码,确定多次曝光重构成功情况,以及HDR融合使用了哪个曝光;
- 重构失败(ReconFail): 对应值为2,代表此坐标点未完成三维重构;可尝试降低重构-有效点判断、飞点剔除阈值以避免重构失败;
- 超范围(OverOfRange): 对应值为3, 表示超出用户设定范围(像素点被范围检查功能剔除); 可检查范围检查相关设置或关闭范围检查,查看当前位置点云是否重构错误;
- 软件预处理滤除(SWPreprocessRemove): 对应值为7, 表示当前数据被认为是离群点, 被软件预处理剔除;可先关闭软件预处理后查看点云重构结果是否正确,再根据当前数据调整软件预处理参数;
2成像问题精定位
2.1 单头(投影仪)重构失败
由于结构光相机基于一系列图像进行三维重构,任何影响到原图质量的情况都会影响到最终的成像效果,表现为重构失败,如三维点缺失、错误的三维点(飞点、毛刺);
 |  |
|---|---|
| 理想3D | 重构3D |
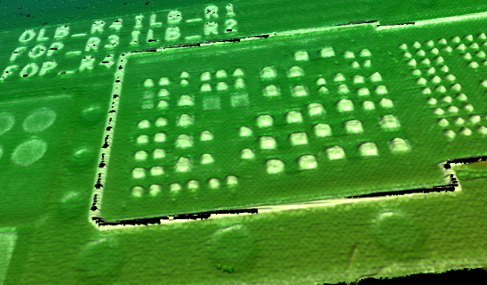
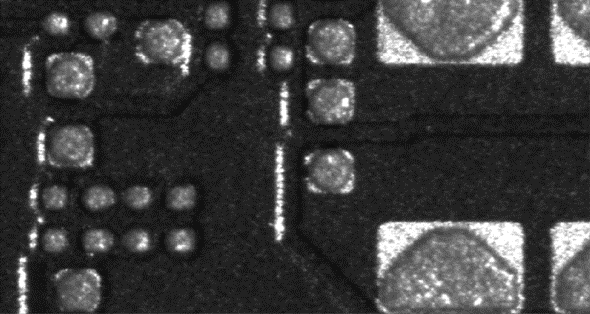
2.1.1欠曝
欠曝表现为重构失败,点云中三维数据缺失(数据中Mask = Invalid);当拍摄反射率较低的物体时,容易出现曝光不足,通常欠曝区域灰度值较低(仅有十几),可尝试调大3D曝光强度以改善成像效果;镜面或类镜面物体(光滑的金属面)也容易出现欠曝,可尝试调整拍摄角度来改善成像效果;
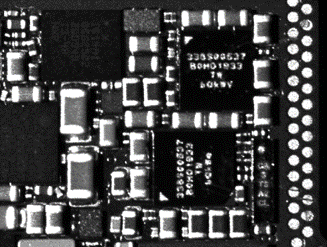 |  |
|---|---|
| 欠曝2D图像(芯片位置) | 欠曝3D重构结果(芯片位置) |
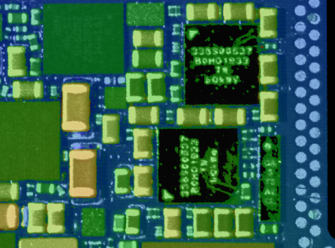
2.1.2过曝
过曝表现为重构错误或重构失败,点云中出现凸包(重构高度高于真实高度)或波浪起伏;当拍摄反射率较高的物体时,容易出现曝光过度;可尝试降低曝光值以得到正确的重构结果;
 |  |
|---|---|
| 过曝2D图像(丝印位置) | 过曝3D重构结果(丝印位置) |
2.1.3多重反射
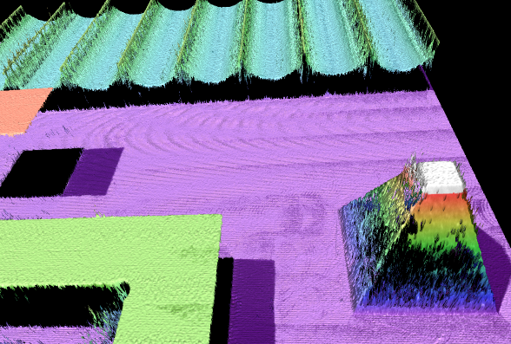
多重反射表现为重构错误,点云中出现片状飞起;存在镜面或类镜面的勺形、V形、凹槽、两个相邻的镜面或类镜面时容易产生多重反射(V形可以通过90°旋转相机来避免多重反射);有时被拍摄非镜面、场景外的反射面,甚至相机本身(虽然是黑色外壳)也会引起多重反射;
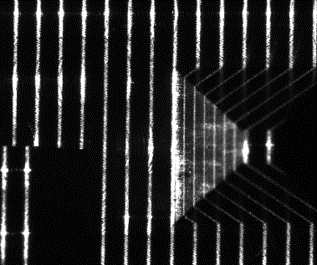 | 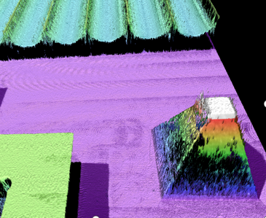 |
|---|---|
| 多重反射2D图像(金字塔左侧面) | 多重反射3D重构结果(金字塔左侧面) |
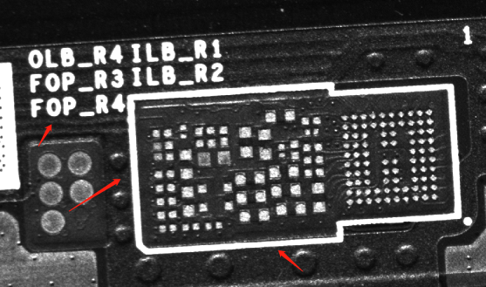
2.1.4 光晕
光晕表现为重构错误,点云中出现凸包或凹坑;光晕通常出现在图像中反射率变化剧烈的地方,由于衍射效应,光晕边缘通常较为模糊,这将使得重构原图在反射率突变的边缘处出现失真,从而影响到重构的结果;
 |  |
|---|---|
| 光晕2D图像(易过曝位置带亮周围灰度) | 光晕2D图像(易过曝位置带亮周围灰度) |
2.2 多头(投影仪)重构失败
重构失败很多情况调整角度可以解决,多头设备从不同角度投影,可从多个角度获取同一物体的信息,从而每个像素点有多个重构结果,多头中“总”有一个是正确的,相比单头更容易得到重构结果;因此,多头可以极大地提升完整性和改善重构失败的情况;但由于同一个像素点有多个头算得的高度值,其中可能有一些是重构失败得到的错误高度值,所以多头的挑战在于,如何检测出错误的高度值,及融合正确的高度值 -- 融合策略
多头重构时相机的合并参数(详细参考:3D相机-用户手册-软件使用-设置-多头)控制相机如何合并多个投影拍摄的数据;当遇到多头重构失败时,应查看多头成像个数是否满足合并参数-数量要求;
- 当成像个数满足合并参数-数量要求时,可逐步增大合并参数-阈值,避免因多头差异使得当前像素重构无效;也可以使用工具栏-测量多头差异辅助确定多头重构差异;
- 当多头差异较大时,可尝试通过专业设置-矫正畸变来降低多头重构差异;
- 当矫正畸变无效时,可联系盛相售后进行相机重新标定;
- 当成像个数不满足合并参数-数量要求时,可将启用的多个头分别单独启用,转为单头成像问题进行排查;
2.3 重构失败的难点
相机在保证足够的动态范围的前提下,又能准确识别出各种重构错误;去除重构错误,甚至矫正错误。
3.其他问题
当排除了上述问题仍无法解决时,需要联系盛相研发对原图进行分析,ConterCenter中工具栏-保存调试数据(专业模式),可将当前设备拍摄到的3D数据及原图以及一些相机设置进行一键保存,用于需要进行原图分析的场景。具体操作方式可参考:3D相机-用户手册-软件使用-工具栏/快捷功能-保存调试数据(Dump)。