设置
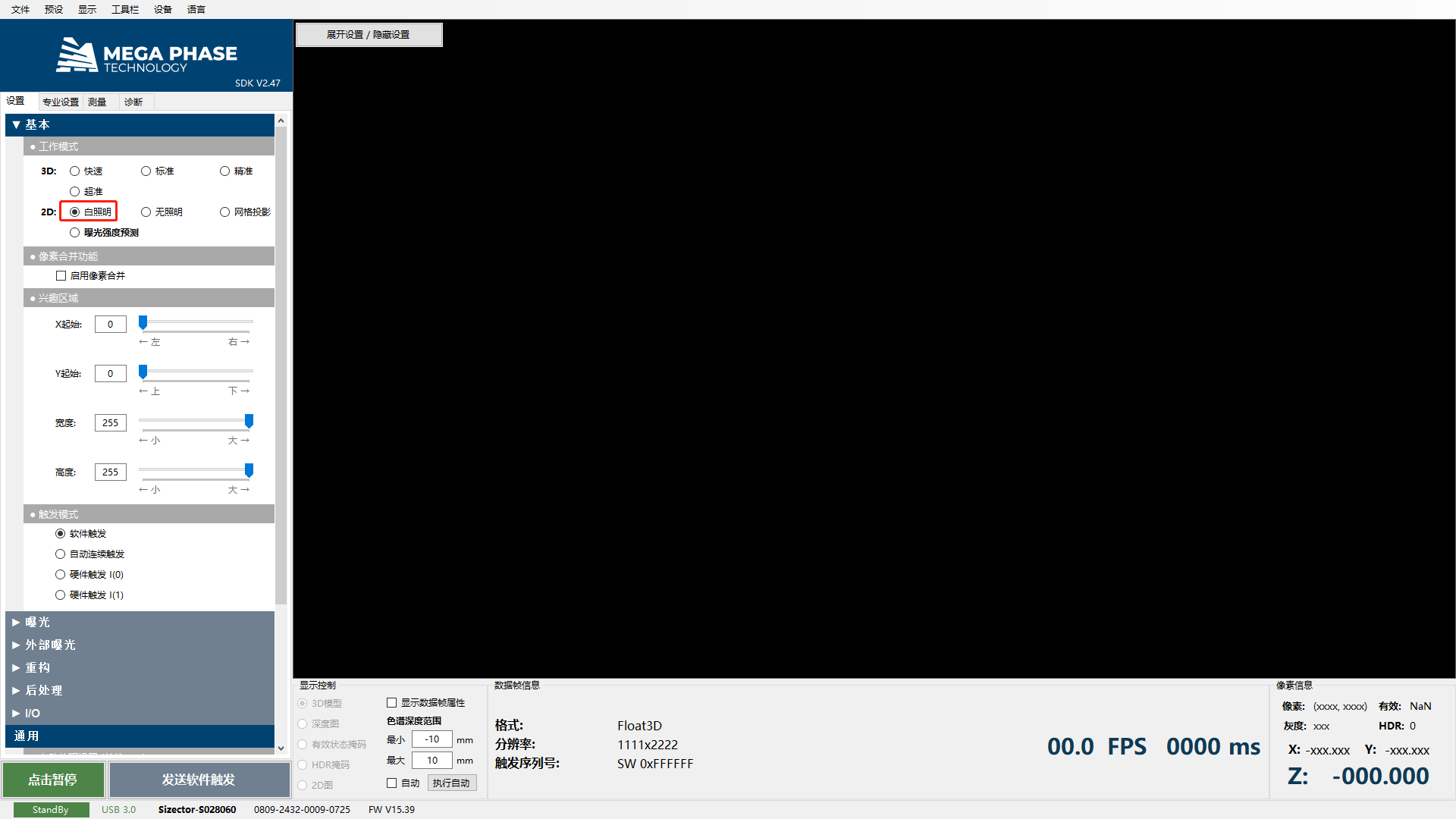
用户点击左侧分页的设置,进入设置界面。 其中分7大模块:
1、基本
2、曝光
3、外部曝光
4、重构
5、后处理
6、IO
7、通用
8、专业设置

基本
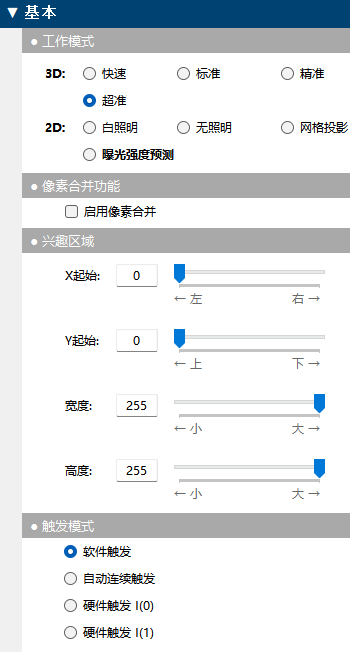
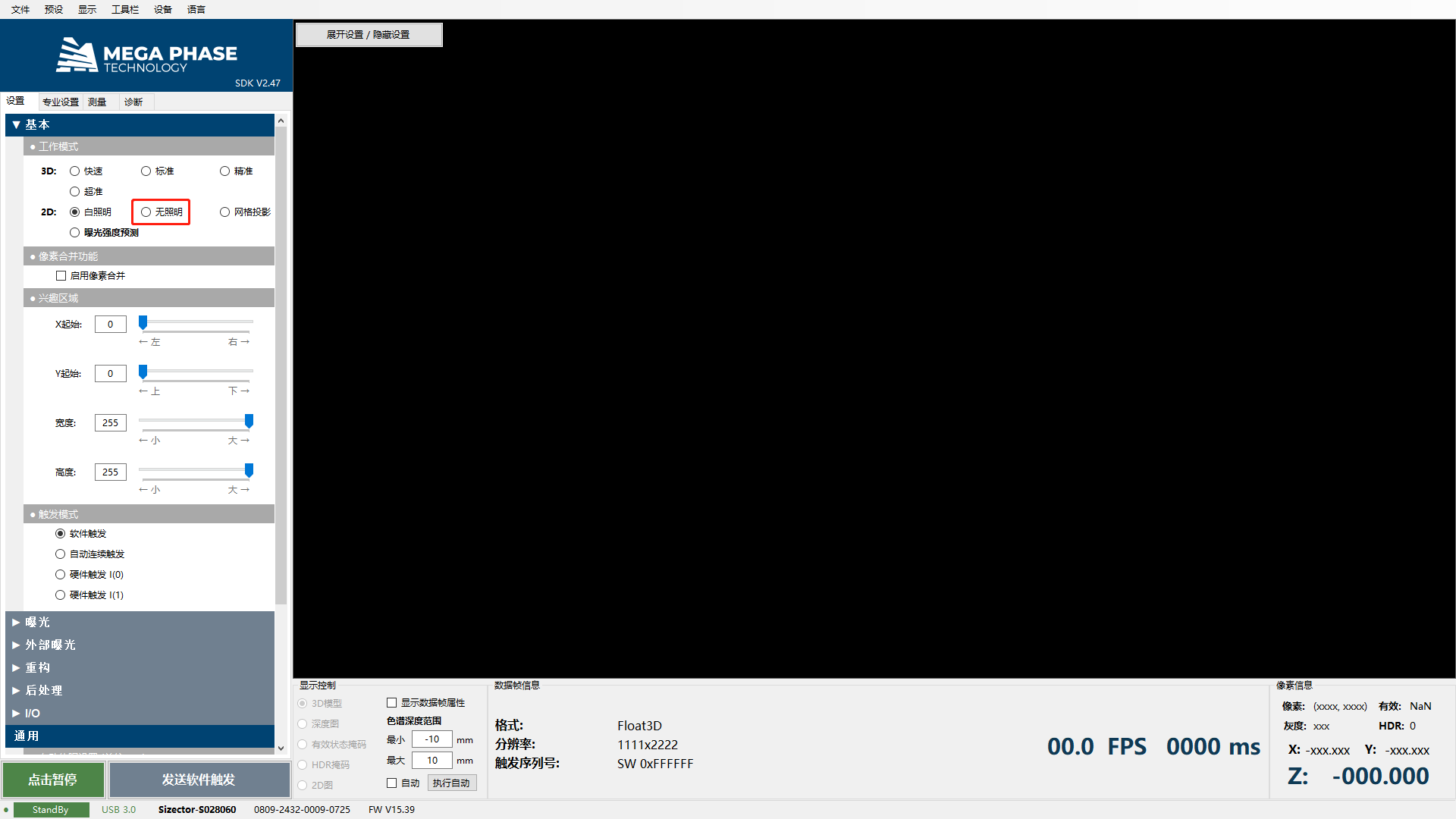
本模块内有"工作模式"、"像素合并功能"、"兴趣区域"、" 触发模式"四个功能,如图3.10。
工作模式
工作模式,可分为3D模式和2D模式两大类。
①3D 工作模式:
目前有4种3D模式:快速(Fast) 、标准(Standard) 、精准(Precise) 、超准(SuperPrecise) ,都将输出3D点云。
| 重复精度 | ||||
|---|---|---|---|---|
快速和标准模式所能获得重复精度是相同的,但标准模式的成像完整性更好。
精准模式与标准模式的成像完整性非常接近,但精准模式的重复精度更好。
超准模式与精准模式相比,完整性和重复精度都更好。
总的来说,越高级的3D工作模式,其拍摄效果越好,拍摄周期越长,系统发热量越大。在实际项目中,用户应根据应用场景的特点,对成像完整性、精度和速度进行权衡,选择最合适的3D
工作模式。
②2D工作模式:
2D工作模式输出数据为2D灰度图像数据。其中包括白照明(White),无照明(Black) ,网格投影(Grid) ,曝光强度预测(Exposure Prediction) 。
白照明模式(White) 是将投影光源投射全白图像时拍摄的2D相片。该图可用于对光源要求不高的2D检测(3D工作模式输出的点云也包含2D图像,与全白照明图相同) 。需要注意的是,由于投影光源和相机存在夹角,光源本身也并非平行光,全白照明图的照明存在视野左右亮暗不均的问题,并且存在阴影。
若全白照明模式不能满足2D图像拍摄的照明需求,可以使用无照明模式(Black) 通过外部光源实现理想的照明效果。在无照明模式下,投影光源不工作。用户可以通过IO输出正在曝光信号,触发外部光源,或通过外部触发信号,实现外部光源和相机的曝光同步。
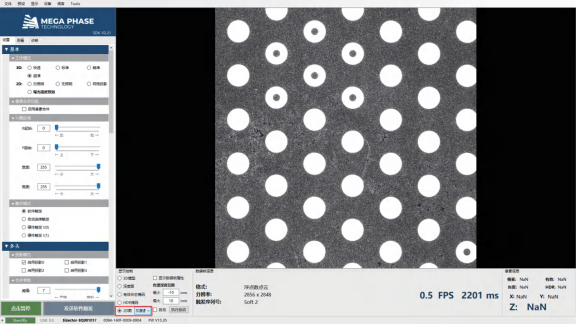
网格投影模式(Grid) 可以用于测试时对物距的粗略调整。该模式与白照明模式类似,但投影的图案不是全白图像,而是带有中心十字线的网格图像。
曝光强度预测图(Exposure Prediction) :该图像中的每一个像素点的值,表达的是目标物 在该像素位置达到最佳成像效果的曝光强度值,可以通过查看感兴趣区域的曝光强度值再进行 手动设置,达到所选区域的最佳效果。
拍摄模式间切换
在产品检测时,有时既需要检测高度方向的尺寸又需要检测2D尺寸,因此需同时获得3D图 像和2D图像。S028和S162系列的优势在于能在同一个工位能同时获取3D图像和2D图像,分别 用于高度方向的尺寸检测和平面的2D尺寸检测。
| 方式 | ①无外部光源 | ②接外部光源 ,软件触发 | ③接外部光源 ,硬件触发 |
|---|---|---|---|
| 操作 | 通过3D相机拍摄一张所需3D 图像 ,同时调用SDK提供的函 数 ,从一拍摄的到的3D数据 中获取2D灰度图 | 通过3D相机拍摄一张3D图像 和白照明2D图像 ,再触发相 机拍摄一张2D无照明图像 | 同② |
| 优点 | 可在拍摄时分别设置3D和2D 图像光源亮度 ,通过一次拍摄 获得两种图像 ,CT短 | 可在拍摄时分别设置3D和2D 图像光源亮度 ,也可在获取 2D图像时通过软件控制或 切换外接光源打光 ,获得成 像质量更好的2D图像 | 可在拍摄时分别设置3D 和2D图像光源亮度 ,在 获取2D图像时通过硬件 触发外接光源 ,获得成像 质量更好的2D图 ,CT比 方式②更短 |
| 提示 | 3D相机投影仪在拍摄时以3D 图像为主 ,同时获取的2D图 像可能存在光不均匀的情况 | 3D和2D图像分别拍摄 ,总拍 摄时间增加 | 外接光源控制器需支持 3D相机硬件控制 |
像素合并功能(Binning)
相机提供2X2模式的Binning,即将4个像素合并为1个像素,像素分辨率为未Binning模式下 的1/4。开启Binning模式后,拍摄速度将显著增快,但并不能达到未Binning 模式的4倍速度。尽 管Binning模式的X/Y像素分辨率显著降低,但其Z轴重复精度反而会有所提升。另外,Binning模 式相比于非Binning模式,在其它设置完全相同的情况下,系统的功耗和发热量都更低。
若用户对X,Y 像素分辨率的要求较低,建议启用Binning模式。
兴趣区域
将原视野裁剪,得到一个自定义长宽的新矩形视野,减少数据量,减少数据处理时间。
触发模式
相机有3种触发方式:软件触发、自动连续触发、硬件触发。其中,硬件触发还可被设置为不同 的输入引脚、不同信号极性,并设置延时。
当设置为软件触发时,产品将只接受由"发送软件触发"按钮发出的触发信号。
当设置为自动连续触发时,产品将在一次数据传输完成之后,自动开始下一帧的拍摄。当设置为硬件触发时,3D相机将同时接受硬件触发信号和软件触发信号。
多头设置(仅多头设备)
当相机为多头设备时,可额外设置多头相关设置,该设置项在非多头设备时会自动隐藏,设置项如下图:
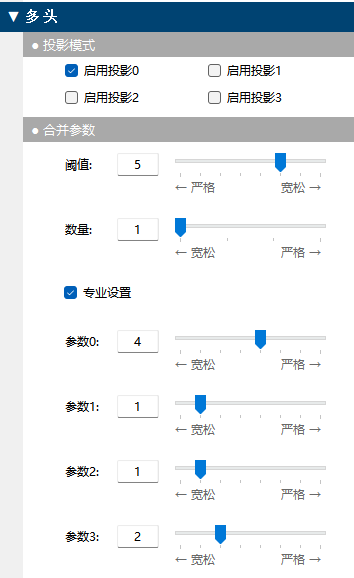
投影模式: 控制启用的投影组合,只有启用投影该投影才会工作
合并参数: 该设置项用于控制相机如何合并多个投影拍摄的数据,有多个可设置项。
- 阈值: 指不同投影数据在这个范围内认为是相近的
换算关系0:0.02mm,1:0.04mm,2:0.06mm,3:0.08mm,4:0.12mm,5:0.16mm,6:0.20mm,7:0.30mm
- 数量: 指对任意点,其至少需要几个头的高度值相近才认为有效。数量越大,数据越可靠,但是三维整体完整性会降低;
如果某个点,其每个头的高度值都不相近:“数量”设置为2或更大,则该点无效;数量为1,则取其中【质量评分】最高的点,质量评分相关权重如下方专业设置
专业设置: 只有合并参数数量设置为1时,才可启用专业设置
参数0: 与其他头的接近程度(约接近,评分越高)
参数1: 与相邻点的高度差(约小,评分越高)
参数2: 条纹清晰程度(约清晰,评分越高)
参数3: 编码清晰程度(约清晰,评分越高)
曝光
曝光模式
Sizector®3D相机S028系列和S162系列支持以下四种曝光模式:
① 手动模式:由用户指定曝光次数,以及每一次曝光所使用的曝光强度。若曝光次数大于 1,则对多个曝光所获得3D点云进行HDR融合,输出融合后的3D点云。
② 手动多次平均模式:由用户指定曝光次数,每次曝光皆采用相同的曝光强度,若曝光次 数等于1,结果与手动模式单次曝光相同;若曝光次数大于1,则对多次曝光所获得的3D点云进 行平均,输出平均后的3D点云。该模式适用于时间相对宽裕,对重复精度要求极高的应用场合。
③ 指定次数自动曝光:由用户指定曝光次数,由硬件自动产生最合适的曝光强度。若指定 的曝光次数大于1,则将输出HDR融合后的点云。该模式适用于被测物确定,但表面可能变化的 场景。
④ 指定质量自动曝光:由用户指定成像质量,由硬件自主决定曝光次数和每一次曝光的 曝光强度。若采用的曝光次数大于1,将输出HDR融合后的点云。若无法达到用户指定的成像质 量,将采用能达到最高成像质量的设置。该模式适用于被测物不确定的场景。
曝光次数
1次曝光,即单个曝光强度进行拍摄;
2次曝光,使用两次曝光强度进行拍摄;
3次曝光,使用三次曝光强度进行拍摄;
单次曝光是最基本的曝光模式,即设定单个曝光强度进行拍摄。
多次曝光是提升3D成像效果的有效手段。若将多个曝光强度相同的3D点云取平均,可以 得到重复精度更高的点云;若将多个曝光强度不同的3D点云进行拼合,可以得到成像完整性更 好的点云。
用户增益
用户增益使得3D拍摄可以在速度和重复精度之间权衡。更高的用户增益将获得更快的拍 摄速度、更低的重复精度,以及更小的发热量。调整用户增益后,用户不需要调整曝光强度以弥 补增益对曝光结果的影响。硬件在曝光时,将自动根据增益值调整曝光时间进行补偿。
3D曝光强度(手动模式)
当曝光模式设置为手动模式时,根据曝光次数的多少,调整每一次的曝光强度的值。 当曝光模式为手动多次平均模式时,每一次曝光都将采用第一次3D曝光强度的值。
注:当曝光模式为自动曝光时,3D相机将不采用此处的强度值,而是使用硬件自动得出的曝 光强度进行曝光。
2D曝光强度
相机支持单独设置灰度图像的曝光强度,可以更改在3D工作模式和2D白照明下的灰度图像 的亮度。
自动曝光设置
① 优先级
曝光模式为自动曝光时,可以通过设置优先级的值,调整自动曝光的评价函数权重。0表示以完整性为最高优先级,7表示以重复精度为最高优先级。

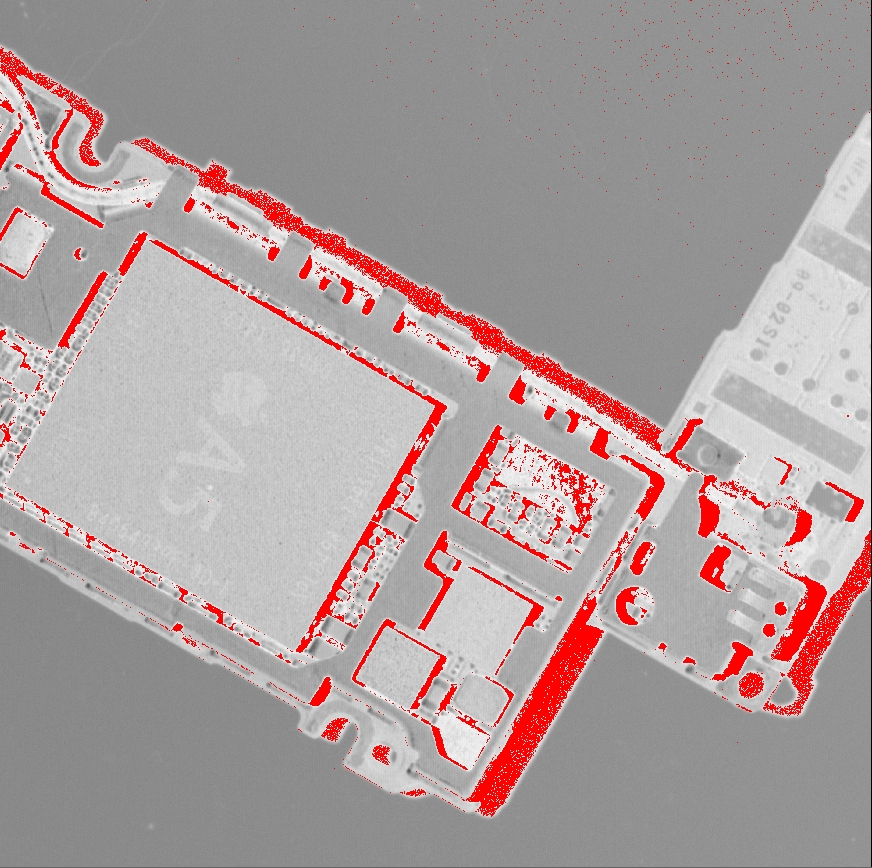
这里举一个例子说明该参数的意义: 在如上图所示的FOV中,该图像99%的像素点的最佳曝光强度在50左右,红色斜线区域内1%的像素点的最佳曝光强度在10左右。
若采用50为曝光强度,99%的点将获得最佳的成像效果,而1%的点将过曝,无法重构。这种策略以重复精度为最高优先级(相当于优先级= 7) ,适用于以量测为目的的应用。
若采用10为曝光强度,可以将100%的像素点都成功重构,但99%的点将因为曝光强度远低于最佳曝光强度,重复性较差。这种策略以绝对精度为最高优先级(相当于优先级= 0) ,适用于以识别为目的的应用。
在实际应用中,用户应当根据具体的需求调整优先级的值。需要注意的是优先级仅在自动曝光模式下起作用。
② 质量阈值
当曝光模式在指定质量自动曝光模式下,由客户指定质量阈值,硬件将寻找可以达到质量阈值且曝光次数最少的设置。随着质量阈值的值增大,曝光设置评估过程将更为严格,得分将降低。因此在调整优先级后,可能要重新调整质量阈值。
当曝光模式选择指定次数自动曝光和指定质量自动曝光时,"质量阈值"处显示自动曝光最 终所采用的曝光参数(曝光次数和每一次曝光的强度) 以及质量得分预测值。
自动曝光结果反馈
应用到手动模式:将自动曝光参数设置到3D曝光强度(手动模式) 下,同时将曝光模式更改 为手动模式。
白照明模式可以拍摄一张以内部投影光做光源的2D图片,无照明模式则会关闭内部投影光
源,以外部环境光做光源拍摄2D图片。
相机支持硬件的同步触发,即当相机进行外部曝光拍摄时,可以通过IO向外围设备(光源控 制器、PLC或上位机) 发送光源曝光信号,从而同步进行光源打光和相机曝光。
多头曝光差异(仅多头设备)
当相机为多头设备时,可额外设置相机多头差异(该设置项在非多头设备时会自动隐藏),如下图:

多头曝光差异的主要功能是根据差异模式将选中的两个投影分为第一组,剩下的投影为第二组,根据差异比计算比率,通过比率减小第一组投影的曝光强度,增大第二组投影的曝光强度。
差异模式: 选择要分为第一组的投影
差异比: 影响曝光强度增大或减小的比率,差异比越大,比率越大。
具体计算公式如下
增大比率 = (10 + 2 * n) / 10
减小比率 = 10 / (10 + 2 * n)
其中n为当前设置的差异比的数值
示例: 一个四头设备, 当设置差异模式为01, 差异比为5时,01头的曝光强度根据计算公式可得减小比率为0.5,23头的曝光强度根据计算公式可得增大比率为2。
外部曝光
外部曝光使能:当前MPSizectorS SDK提供白光通道和RGB通道两种模式选择,可以同时 选择白光和RGB,也可以单独选其中一种模式。
外部曝光时间(单位:μs) :每个通道的相机曝光时间。
外部曝光增益:每个通道的相机曝光增益。

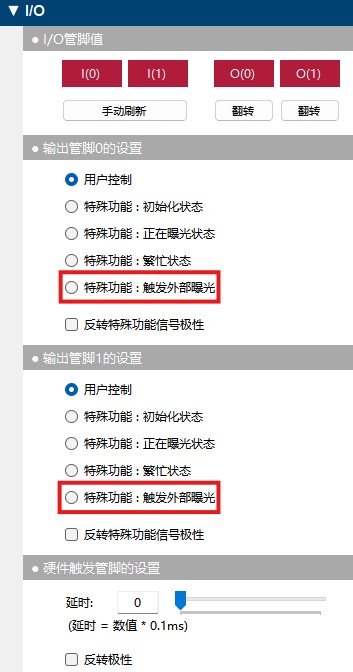
外部曝光时需要在IO设置界面上,激活对应接线引脚的外部曝光功能。
在外部曝光功能界面使能对应颜色通道的功能和IO设置完成后,在相机被触发拍照时,相 机依次拍摄一张白照明2D图和一张3D图,再按照设定通道拍摄外部曝光2D图。如图3.17所示,分别为 白照明2D图 / 3D图 / R / G / B

在使用外部曝光功能时,外部光源的触发信号由相机自动触发。在每个通道开始曝光之前, 相机通过IO向外部发出电信号,注意此信号持续时间为15μs,需要外部光源控制器的触发带宽 支持。可在软件中查看各个通道拍摄图和RGB合成图:
重构
过曝滤除
移相法3D重构技术依赖于一系列2D图像,若这些2D图像的某些像素发生了过曝,依据过曝 程度的不同,可能导致3D重构产生彻底错误的结果(飞点) ,也有可能只是产生误差略大的结果, 也有可能不产生任何可观测到的影响。
过曝滤除阈值决定如何判断一个像素点是否应该因为2D原图过曝而被标记为不可重构的 像素点:阈值为0时,允许任何程度的过曝,即允许任何过曝点,将导致过曝飞点增加。除非追求绝 佳的单次曝光成像完整性,且毫不介意飞点数量,否则不建议使用这种方式。
阈值处于1~15时,允许一定程度的过曝,值越大,剔除越多过曝点。阈值为16时,不允许任何 程度的过曝,即剔除所有过曝点,它可以确保一切因过曝导致问题的点都被滤除,但也会滤除一 些轻微过曝未对结果产生影响的点,这种方式的成像完整性相对较差。自动模式时,设备根据不 同的3D工作模式,自动设置过曝滤除阈值。
需要注意的是,过曝严重程度与其对重构结果的影响的关系并不是一成不变的。对于不同的 3D工作模式和不同的被测物,可能会出现在某些情况下,过曝剔除阈值的设置可以剔除所有带 有显著误差的点,而有些情况下却不可以。
若过曝滤除阈值设置得不够严格,HDR模式的结果将带有显著的飞点或误差。在HDR融合算 法中,总是取曝光强度最大,且重构成功的那一次曝光的重构结果作为输出数据。在HDR中,若最 大曝光强度的拍摄产生了导致严重错误的过曝,且没有通过合适的过曝滤除阈值设置滤除,它必 将会作为HDR融合结果输出。因此建议在HDR模式下,适当加严(增大) 过曝滤除阈值,使得曝光 强度最大且过曝的点被标记为过曝,HDR融合输出低曝光强度且未过曝的正确结果。

如上图所示,左图呈现极其严重过曝导致的飞点,右图有波浪状误差。
有效点判断与飞点剔除
相机提供两个有效点阈值,以及两个飞点剔除阈值。
有效点判断包含两个阈值: 阈值0-亮度阈值,阈值1-对比度阈值
飞点剔除阈值包含两个阈值: 阈值0-环境光抑制,阈值1-反射抑制
有效点判断和飞点剔除是通过一定算法来判断一个点是否是飞点的。尽管这4个参数在名 称和原理上不同,但其作用是相同的,即把点云中除过曝以外的问题点标记出来,增大有效点阈 值来剔除更多的重复精度较低的点。在使用有效点阈值和飞点剔除阈值排除错误飞点时,应当 先将所有参数设置为0(最宽松) ,然后逐一增大至能够剔除最多飞点但不剔除正常点的值(顺序 任意)。
预处理
预处理是对点云进行优化的处理,包括滤波、修补、去毛刺3个处理项。
预处理的次数越多,平滑效果越显著,增加预处理次数可提高重复性精度。
该参数范围为0~5,当次数为0时,预处理功能关闭。
预处理的阈值是针对高差特征的识别阈值。阈值越严格,减少预处理对越小的高度差特征 的滤波;阈值越宽松,滤波效果越大。
滤波会在一定程度上改变点云的表面轮廓,迭代次数越大,改变的程度越大。
后处理是在预处理之后的数据处理方式。预处理对3D点云的内容会造成实质性的改变,而 后处理则只是对数据输出结果进行转换和标记。
后处理
3D点云格式
浮点数点云的X, Y, Z坐标分别以32位浮点数表示,定点数点云的X,Y,Z坐标分别以16位无符 号整数表示,深度图点云和简化深度图点云Z坐标以16位无符号整数表示。

浮点是小数形式的物理坐标值,其优点是表达范围广,精度最高,缺点是占用空间大、传输 慢。定点数的优点是数据占用空间小、传输快,缺点是需要指定真实坐标值和数值的对应关系以 及会损失一部分精度。深度图的点云格式则是在定点数的基础上省去了XY的坐标信息,只保留Z 坐标,Gray和Mask。简化的深度图则进一步的省略了Gray和Mask,只保留了Z值。
| 点信息 | 浮点数 | 定点数 | 深度图 | 简化的深度图 |
|---|---|---|---|---|
| X | ✔ | ✔ | ||
| Y | ✔ | ✔ | ||
| Z | ✔ | ✔ | ✔ | ✔ |
| Gray | ✔ | ✔ | ✔ | |
| Mask | ✔ | ✔ | ✔ |
3D数据格式需要根据数据分辨率、数据范围等在应用中的情况,以及后端点云处理算法来选择。
矩阵变换
相机支持不增加生产周期的硬件级矩阵变换。
可通过参数设置如下图:
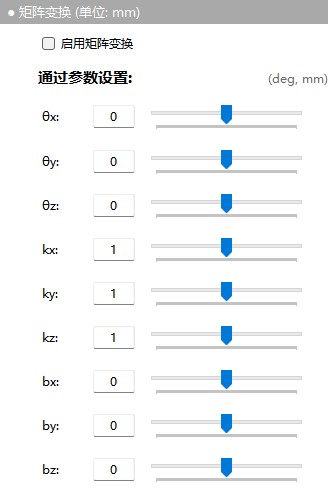
θx:图像围绕X轴进行旋转;
θy:图像围绕y轴进行旋转;
θz:图像围绕z轴进行旋转;
kx:图像在X方向上面进行拉伸和收缩;
ky: 图像在Y方向上面进行拉伸和收缩;
kz: 图像在Z方向上面进行拉伸和收缩;
bx: 图像在X方向上面进行平移;
by: 图像在Y方向上面进行平移;
bz: 图像在Z方向上面进行平移;
也可直接设置该矩阵如下图:

4X4矩阵可同时表示图像的旋转、缩放和平移
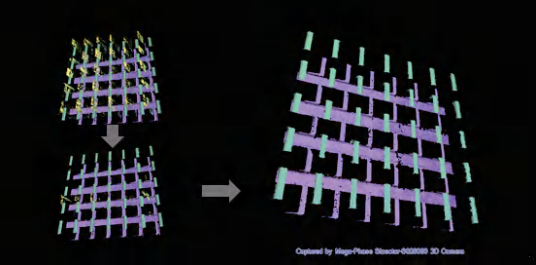
矩阵变换功能的一个常用场景是多FOV 拼接。用户可以在进行每一次3D 拍摄之前根据运动位置设置对应的矩阵,直接得到以拼接后的完整FOV 原点为参考的点云,无需在拼接之前通 过PC 进行坐标转换。
另一个应用场景是,在大规模复制相同的应用场景时,使用该功能来矫正每一个应用系统 的机械偏差,使得被测物在不同的系统中所处的坐标是大致相同的。
定点转换
当3D点云格式为定点数点云时生效。
X0、Y0、Z0坐标值为图像的起始位置坐标,X、Y、Z增量为定点数每增加1坐标所增加的增量。
例如:S0280603D相机,X增量为0.0012mm,可显示最大视野为65535*0.0012=78.642mm。 所以X0的坐标值设置为78.642÷2≈39.3mm。
注:当0坐标值或增量设置错误后,会出现图像3D点云不显示的情况。
范围检查
用户可通过设置X、Y、Z的最大最小值,将超过用户指定范围的点标记为无效点。它的作用是 滤除背景、工装夹具、不感兴趣区域,以及难以去除的顽固飞点。该功能属于硬件处理因此不增 加软件处理时间。

I/0
I/O管脚值
显示当前输入和输出和IO的状态,并可通过翻转来使状态保持,可以在传感器指示灯中查
看是否有正确翻转。

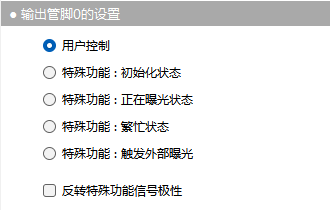
输出管脚的设置
相机提供两个输出管脚,并可设置为不同的工作模式:
用户控制:通过设置EXTIOOutput由用户直接控制输出管脚的逻辑值。
特殊功能
初始化状态模式:输出信号为初始化状态。对于正极性,1表示初始化完成。
正在曝光状态模式:输出信号为正在曝光状态。对于正极性,1表示正在曝光。该功能可以用 于在2D模式下触发外部光源,或在完成3D拍摄后,触发机械搬运动作。
繁忙状态模式:输出信号为忙状态。对于正极性,1表示设备正忙。与正在曝光不同,当设备
正在传输数据时,忙状态也为1。
触发外部曝光模式:输出触发外部曝光信号。对于 正极性,1表示正在输出。该功能在3D模式下触发外部 光源时使用。
当设置为特殊功能模式时,可以设置反转特殊功能
信号极性将特殊功能信号的极性反转。
硬件触发管脚的设置
当外接IO输入触发时,延时时间为收到IO输入信号后延迟多久进行触发拍摄;默认有效输
入信号为高电平,当选择反转极性后输入信号为低电平。

通用
自动休眠设置
用户可手动设置相机进入休眠状态的延时时间,延时范围【100ms~65535ms】。当启用自动 休眠功能时,若在设置的延时时长内未收到出发信号,相机将自动进入休眠状态;在收到触发信 号后相机将会被唤醒。

默认设置
上传为设备默认设置:将当前设置上传到设备,保存为设备的默认设置;载入设备默认设 置:将设备的默认设置下载到软件中作为当前设置。
专业设置
专业设置详细说明请参考相关专题文档:SizectorSDK专业设置功能相关说明